




挖掘機的工作過程
發(fā)布:admin 瀏覽:19157次
單斗挖掘機的工作裝置主要有正鏟,、反鏟,、拉鏟和抓斗等形式(見圖2-1),它們都屬于循環(huán)作業(yè)式機械,。每一個工作循環(huán)包括挖掘,、回轉(zhuǎn)、卸料和返回四個過程,。
一,、機械式單斗挖掘機的工作過程
1.正鏟挖掘機
正鏟挖掘機的工作裝置如圖2-2所示,由動臂2,、斗桿5和鏟斗1等組成,。
正鏟的工作過程為:
(1)挖掘過程。先將鏟斗下放到工作面底部(1),,然后提升鏟斗,,同時使斗桿向前推壓(有的小型挖掘機依靠動臂下降的重力來施壓),,完成挖掘(II→II)。
(2)回轉(zhuǎn)過程,。先將鏟斗向后退出工作面(IV),,然后回轉(zhuǎn),使動臂帶著鏟斗轉(zhuǎn)到卸料位置(V),。同時可適當調(diào)整鏟斗的伸出度和高度適應卸料要求,,以提高工效。
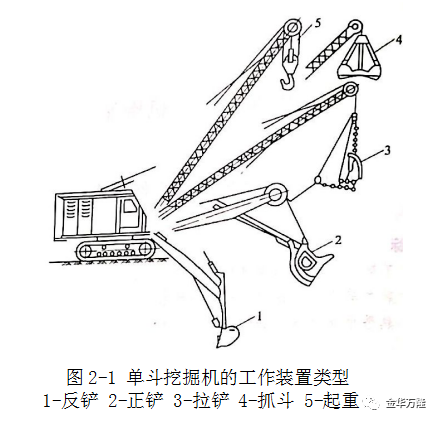
(3)卸料過程,。開啟斗底卸料(VI),。
(4)返回過程?;剞D(zhuǎn)挖掘機轉(zhuǎn)臺,,使動臂帶著空斗返回挖掘面,同時放下鏟斗,,斗底在慣性作用下自動關團(VI-→1),。
機械傳動式正鏟挖掘機適宜挖掘和裝載停機面以上的1~IV級土和松散物料。
2.反鏟挖掘機
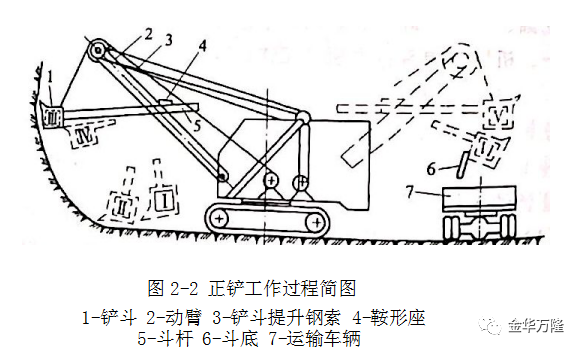
機械傳動式反鏟挖掘機的工作裝置如圖2-3所示,,由動臂5,、斗桿4和鏟斗2等組成。動臂由前支架7支持,。
反鏟的工作過程為:
(1)先將鏟斗向前伸出,,讓動臂帶著鏟斗落在工作面上(I)。
(2)將鏟斗向著挖掘機方向拉轉(zhuǎn),,于是它就在動臂和鏟斗等重力以及牽引鋼索的拉力作用下完成挖掘(II),。
(3)將鏟斗保持且所示狀態(tài)連同動臂一起提升到目所示狀態(tài),再回轉(zhuǎn)至部科處進行卸料
反鏟主底有可開啟式(N)與不可開啟式(V)兩種,。
反鏟挖掘機適用于挖掘停機面以下的上,,例如挖掘基坑及溝槽等,。機械傳動式反鏟挖掘過程由于只是依靠鏟斗自身重力切土,,所以只適宜于挖掘輕級土和中級上。
3.機械傳動式拉鏟挖掘機
機械傳動式拉鏟挖掘機的工作裝置如圖2-4所示,,它沒有斗桿,,而是由格柵型動臂與帶鋼索的懸掛鏟斗1組成。鏟斗的上部和前部是敞開的,。
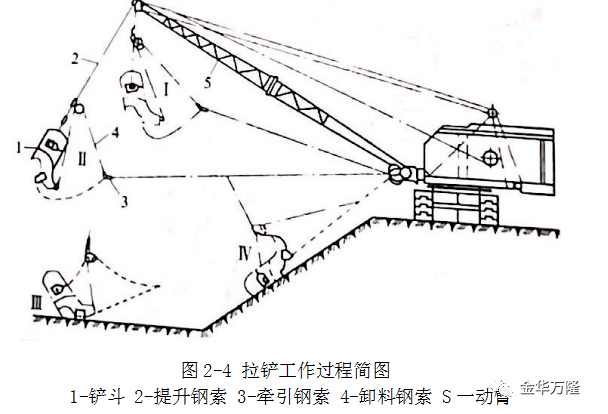
拉鏟的工作過程為:
(1)首先拉收和放松牽引鋼索3,,使鏟斗在空中前后擺動(視情況也可不擺動),將鏟斗提升到位置I,,然后同時放松提升鋼索和牽引鋼索,,鏟斗被順勢拋擲在工作面上(I-I皿),,鏟斗在自重作用下切入土中。
(2)拉動牽引鋼索,,使鏟斗裝滿土(IV),。
(3)然后提升鏟斗,同時放松牽引鋼索,,使鏟斗保持在斗底與水平面成8°~12°仰角,,防止鏟斗傾翻卸料。
(4)在提升鏟斗的同時將挖掘機回轉(zhuǎn)至卸料處,,放松牽引鋼索使斗口朝下卸料,。
(5)挖掘機轉(zhuǎn)回工作面進行下一次挖掘。
拉鏟挖掘機適宜挖掘停機面以下的土,,特別適用于開挖河道等工程,。由于拉鏟靠鏟斗自重切土進行挖掘,所以只適宜挖掘一般土料和砂礫等,。
4.抓斗挖掘機
抓斗挖掘機的工作裝置如圖2-5所示,,它帶有兩瓣或多瓣的蚌形抓斗1。抓斗用提升索2懸掛在動臂4上,。斗瓣的啟閉由閉合索3來執(zhí)行,。為了不使抓斗在空中旋轉(zhuǎn),用一根定位索5來定位,。定位索的一端與抓斗固定,,另一端與動臂連接。
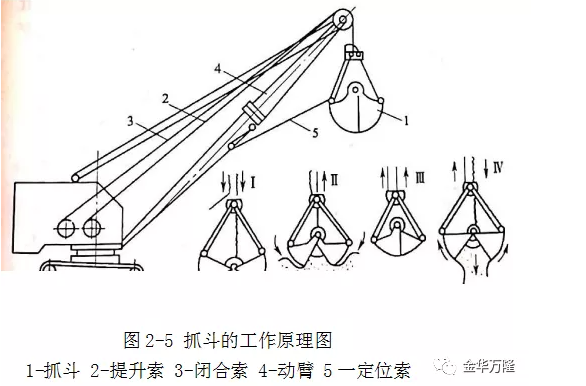
抓斗的工作過程為:
(1)放松閉合索,,固定提升索,,使斗瓣張開。
(2)同時放松提升索和閉合索,,讓張開的抓斗落在工作面上,,并借自重切入土中(1)。
(3)逐漸收緊閉合索,,抓斗在閉合過程中裝滿土料(I),。
(4)當抓斗完全閉合后,提升索和閉合索收緊,,并以同一速度將抓斗提升(III),,同時將挖掘機轉(zhuǎn)至卸料位置。
(5)放松閉合索,,使斗瓣張開,,卸出土料(IV)。
抓斗挖掘機適宜挖掘停機面以上和以下的土,卸料時無論是卸在車輛上或棄土堆上都很方便,,特別適合挖掘垂直而狹窄的橋基樁孔,、陡峭的深坑以及水下土方等作業(yè)。但抓斗受自重的限制,,只能挖取一般土料,、砂礫和松散料。
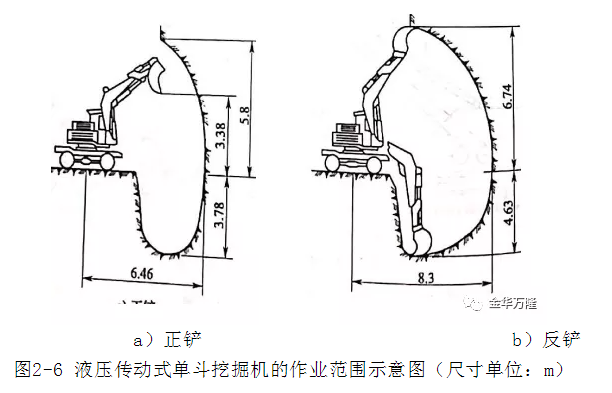
二,、液壓傳動式單斗挖掘機的工作過程
液壓傳動式單斗挖掘機一般只帶正鏟,、反鏟、抓斗和起重工作裝置,,其工作循環(huán)和機械傳動式挖掘機基本相同,。由于其挖掘、提升和卸料等動作是靠液壓油缸來實現(xiàn)的,,因此,,其工作能力比同級機械傳動式挖掘機要高。液壓傳動式單斗挖掘機正鏟,、反鏟的作業(yè)范圍如圖2-6所示,,兩者對停機面上下的作業(yè)都能挖掘。

金華萬隆機械工程機械技能培訓部歡迎您,!
金華市萬隆工程機械技能培訓部本校專業(yè)培訓挖掘機,、裝載機、叉車和電工,、電焊工考證:,;叉車檢測、上牌,、年審,、保險以及各種工程機械類考證;詳情咨詢 0579-82165896 ,,官網(wǎng) www.zjswanlong.com

 浙公網(wǎng)安備33070202100467號
浙公網(wǎng)安備33070202100467號